動画像に対する動き解析/推定
--- 画像の各部がどの程度動いているのかを検出する技術
---
次の画像は,テスト動画像”フラワーガーデン”の第1および第2フレームです.
以下, マークのついた画像は動画像です.画像をクリックすると
動画として御覧頂けます.
マークのついた画像は動画像です.画像をクリックすると
動画として御覧頂けます.

(a) フラワーガーデン第1フレーム |

(b) フラワーガーデン第2フレーム |
両フレーム間の各部の動きは比較的小さなものですが,良く見ると,
手前の幹が左側に移動すると共に,背景の花壇や家なども
僅かに左側に移動しています.いま,
- 第1フレームと第2フレーム間の各部の動きを求める
(動き推定).
- 第1フレームの各部を対応する動き分だけシフトする
(動き補償).
という処理により,第1フレームから第2フレームの
予測画像 を作ることができます.次の左側の画像(c)がこうして作った予測画像です.
では,この予測画像はどの程度正確なのでしょうか?
それは,原画像(b)と予測 画像(c)の差をとってみれば判ります.(d)が両者の差です.幹の両端など
隠れている部分が表に出たり,逆に表に出ている部分が隠れたりすると
予測は困難となり,誤差は大きくなります.しかし,まあまあ満足のいく予測画像が
得られています.

(c) 第2フレームの予測画像 |

(d) (b)と(c)の差分(予測誤差) |
ところで,動画像を符号化する際の最も簡単な手法は,(a),(b)のような連続する
2枚のフレームをそれぞれ静止画像として単独に符号化するものです.しかし,MPEGな
どではさらに効率の良い手法が用いられています.それは,
- 最初のフレームのみ,静止画像として符号化する
- 直前のフレームを参照して,対象フレームの各部の動きを
表す動きパラメータ求める (動き推定).
- 直前のフレームの各部を求めた動きの分だけシフトし,対象フレームの
予測画像を求める(動き補償).
- 符号化対象フレームと予測画像の差分画像を求める.
- 差分画像を静止画像として符号化する.
という手順です.これを 「動き補償に基づく予測符号化」 等と呼びます.このような手法を用いる理由は簡単で,

となり,動きパラメータと差分画像を符号化する方がデータ量が小さく済むからです.
画像の各部の動きを求める手法 --- 動き推定 --- の 最大の応用分野は,このような 動画像の符号化 です.
では,実際には「動き推定」は,どのように実行されるのでしょうか?
あまり凝った「動き推定」を行なうと,
- 推定に要する計算時間/計算量が膨大となり,実用性が失われる.
- 動きパラメータ量が増え過ぎ,せっかくの利点が失われる.
ことにもなりかねませんから注意が必要です.そこで,MPEGなどでは,
ブロックマッチングという単純なアルゴリズムが 用いられています.
ブロックマッチングは,
- 画像内の動きは,ほぼ「並行移動」として近似できると仮定する.
- 画像を適当なサブブロックに分割し,サブブロック単位で並行移動分を求める
というアルゴリズムです.具体的手順は次のようになります.(f)は動きパラメータ
を求める対象フレーム,(e)はその前のフレームです.
- 対象フレームを適当なサブブロックに分割する.MPEGでは,縦×横=16×16の
ブロックが用いられます.
- 一つのブロックに着目し,これを前フレーム(e)上でスライドさせて,最も
よくマッチする部分を捜し出す.実際には,ブロック間の 距離関 数を定義し,この距離が最小になるブロックを見つけます.通常,距離には,
絶対値誤差や2乗誤差が用いられます.
- 前フレーム上での対象ブロックのシフト量をベクトルとして求める.
これを 「動きベクトル(MV)」と呼びます.
- 対象フレーム上のすべてのブロックに対するMVを求める.
 一方,動き補償により予測画像を作成する手順も単純で,対象フレームのMVに従って
前フレーム上のブロックを切り出し,予測画像上に張り付けるだけです.
一方,動き補償により予測画像を作成する手順も単純で,対象フレームのMVに従って
前フレーム上のブロックを切り出し,予測画像上に張り付けるだけです.
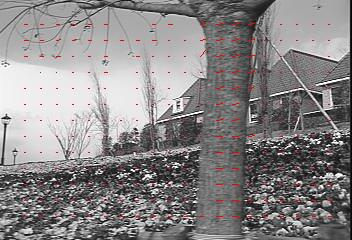
下の(g)は,このようなブロックマッチングによって求めた(b)の
フラワーガーデン第2フレームの動きベクトル場です.

(g) フラワーガーデン第2フレームの動きベクトル(MV)場
さて,ここからが我々の研究の中心部分です.MPEGなどの画像では,上図(g)の
ような動きベクトル場を各フレームが持っていますが,これは,
符号化のためだけではなく, 他の応用にも非常に便利なデータ と考えられます.例えば,
- 画像中から動いている部分のみを切り出す.一種の
セグメンテーション です.
- 動き量に応じて画像を検索する .「背景が静止で中心部分が人が左側に動いている場面を探す」などです.
- 画面内の物体の運動解析を行なう.移動速度や方向を計算するなど.
です.しかしながら,
ブロックマッチングで得られた動きベクトル(MV)は,本当に各部の動きを正確に
表しているのでしょうか?????
答えはノーです.それは,
ブロックマッチングは,対象フレームと予測フレーム間の誤差を最小とす
る(時間方向の相関を最も良く除去する)ベクトルを求めるアルゴリズムであって,
このベクトルが各部の動きに対応するとは限らない.
からです.実際,上図(g)の動きベクトル場では,特に
- ブロック内がフラットで輝度変換が乏しい場合.前フレーム上のどこにでも
マッチングするため,正確な動きは求まらない.
- ブロックが単一のエッジのみを含む場合,このエッジに並行な動きは求められな
い.
等の問題のため,実際の動きとは異なったベクトルが検出されています.この
ベクトルを符号化に応用する場合にはこれで問題はないのですが,上に示した
画像検索やセグメンテーションに用いる場合には誤差の原因となり,好ましくありま
せん.
そこで,我々は,
-
符号化の効率を大きく損なうことなく
-
極力実際の各部を反映させた「動きベクトル」を検出する手法
を研究しています.(h)は,当研究室で研究したアルゴリズムによって
求めた(b)のフレームに対する動きベクトル場です.(g)に比べ,「暴れている」動き
ベクトルが減少し,全体として 精度とコヒーレンスの高い 動きベクトル場が 得られています.また,(i)は,他の動画像---特に動きベクトル が「暴れる」原因となるフラットな部分の多い画像---
に対して同じ手法を適 用した結果です.(j)の従来のブロックマッチングの結果と比べ,全体の精度が改善さ
れています.しかも,MPEGに用いた場合, 提案法の(i)の方が効率が良い のです(理由は,動きベク トルを符号化する符号量が減少するからです).
(h) 提案法によるフラワーガーデン第2フレームの動きベクトル場

(i) 提案法 |

(j) 従来のブロックマッチング法 |
我々は,提案手法を用いて動画像をMPEGエンコードすることにより精度の高い
動きベクトル場が得られるため,これ を 動画像検索に応用しています.
提案法で用いている手法等,詳細については,発表文献を御参照下さい.
